扳手腕机器人已成为自动化行业比较热门的一个研究方向,它一般涉及传感器的设计研究、人工智能、控制系统的设计以及微电子专业等相关领域。同时,扳手腕机器人所带来的各方面的拓展和价值与日俱增,使其在研究领域有着不可动摇的地位,比如,在医疗保健方面,扳手腕机器人的相关产品可用于帮助肌肉萎缩或残疾人士进行康复训练和协调训练。此外,在体育运动领域,该机器人也有很多方面的应用。
本文主要研究了扳手腕机器人所涉及传感器部分,大体有力和力矩传感器和速度传感器。而市面上,比较普遍的是六维力传感器,即在空间三维里各方向上的力和力矩。伴随着科技的不断发展,力传感器作为一种力与电信号的转换元件,在机器人智能化和灵活化的大趋势下的应用已经越来越广泛了。
但问题是,一般压电式传感器的输出是十分微弱的,通常需要配备一个放大装置以增强其输出的微弱电信号。最常用的测量电路主要是电压放大器电路和电荷放大器电路。本文主要分析了压电力传感器的等效模型,分析了各种两种电路的优缺点,最终选择电荷放大器作为测量电路,并设计了其五个重要模块,用Multisim软件进行了仿真实验及相关测试。论文的具体内容主要体现在以下几个方面:
(1)分析了力传感器的国内外研究现状。
(2)讨论了压电效应及两种传感器测量电路的等效模型和等效电路。
(3)用Multisim软件进行了放大器仿真实验。
(4)在现有的实验条件下,研究了准静态电荷放大器及其测试。
关键词:扳手腕机器人,压电式力传感器,电荷放大器,测量电路
毕业论文原创性声明 II
毕业论文版权使用授权书 II
摘要 III
Abstract IV
目录 V
第一章 绪论 1
1.1 引言 1
1.2 扳手腕机器人的研究现状 1
1.3 多维力传感器的研究现状 1
1.4 技术难点分析 2
1.5 多维力传感器测量电路的国内外研究现状 2
1.6 本文研究的主要内容及意义 5
第二章 压电传感器的原理及等效电路 5
2.1 压电传感器的工作原理 5
2.1.1 压电效应 5
2.1.2 压电材料 6
2.1.3 压电式力传感器的工作原理 7
2.2 力传感器的等效电路 9
第三章 压电力传感器的测量电路 10
3.1 测量电路的研究与分析 10
3.2测量电路的设计要求 10
3.3测量电路的整体设计 12
3.3.1 电荷放大器电路 12
3.3.2 电压放大器电路 13
3.4 电荷放大器 14
3.4.1 电荷放大器电路分类 14
3.4.2电荷放大器的结构 15
3.4.3电荷放大器的频率特性 16
第四章 测量电路的Multisim软件仿真和设计 17
4.1设计要求 17
4.2 Mulitisim软件的介绍 17
4.3各模块的仿真 18
4.3.1传感器等效模型仿真 18
4.3.3放大级的仿真 19
4.3.4滤波级仿真 20
4.3.5输出级的仿真 21
4.3.6过载指示级的仿真 21
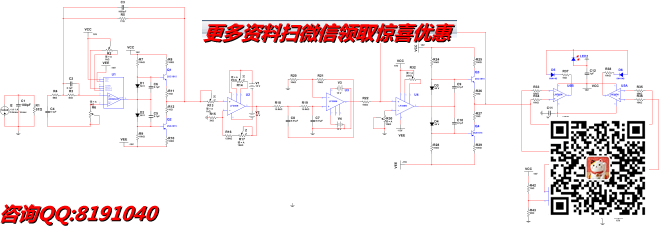
4.4系统整体设计图 23
第五章 全文总结与展望 23
本文研究的主要内容及意义
近年来,随着电子技术的发展,传感器正趋向于准静态测量的方向发展。而高输入和高绝缘电阻电缆的出现是准静态的两个必要条件。但目前市场上能够达到准静态特性的电荷放大器,少之又少,不仅仅价格昂贵,而且维护上要很多要求。本文主要针对多维力传感器的电荷放大器进行了研究和设计,是十分具有科学意义的。电荷放大器作为力传感中的测量电路,它不但能够将传感器的高阻抗输入转变为低阻抗输出,而且能够将微弱的电信号放大为可观测的信号,其本身作用是巨大的。
本文对多维力传感器的测量电路作了进一步的研究和分析。通过对传感器原理的挖掘,并参阅大量文献和资料,优化了电荷放大器的设计,简化了电路。同时,后期也做了数据采集的工作,在调试和试验阶段对干扰、噪音和零点漂移等问题作了精细的分析。
本文主要内容包括:
(1)第一章是绪论部分,先是概述了扳手腕机器人和多维力传感器的国内外发展情况,以及力传感器的测量电路和技术难点,最后是本文的主要研究内容和意义。
(2)第二章主要讨论压电传感器的原理和等效电路。
(3)第三章是电荷放大器的设计与研究。
(4)第四章运用Multisim软件对多维力传感器的测量电路(电荷放大器)各模块进行仿真。
(5)第五章对电荷放大器进行分析与总结。
本文主要是针对近年来发展起来的扳手腕机器人的六维腕力传感器进行了传感器测量电路的设计,并用Multisim软件进行了仿真。腕力传感器作为一个力传感器的一个分支,在机器人智能化的发展进程中有着重要的地位。这其中,最重要的一个环节就是电荷放大器的设计。本文结合众多科研工作者的研究成果,并加上自己独到的想法和设计,提出并设计了一种全新的传感器测量电路。
本文的主要内容有:
(1)对国内外扳手腕机器人、压电式六维力传感器的发展现状进行了调查研究,基于发展情况,提出了所需要解决的技术难点和需要改善的问题。
(2)从压电效应的角度逐步介绍了压电力传感器的工作原理、两种等效模型(电压放大和电荷放大),并分析了二者的优缺点。
(3)针对这两种电路,设计分析了两种测量电路,并对它们的优点和可行性进行了合理分析。
(4)运用软件对电荷放大器五大模块进行了模型仿真。
(5)在现有的基础上对仿真实验结果进行了分析和推理。
由于实验条件的局限,后期没有做传感器电路PCB板的设计,而只是单纯的分析了仿真实验,同时也没有对电荷放大器准静态进行研究。