摘要:机器人是一种能够模仿人类动作的机器,它可以完成许多对人类来说危险且单调的工作,机器人让人类从繁重、单调的工作中解脱出来。它们从事固定而有规律的工作,例如工业生产中的焊接、喷漆等等。
本文主要设计的是扫地机器人的设计,该机器人采用统一动作、协调控制的原则,通过电机带动动力轮实现扫地机器人的运动,通过中控系统的控制来实现扫地机器人的动作,由于是中控系统控制,所以控制灵活,多样。通过控制器来控制机器人的动作,实现该机器人清扫、除尘的功能。
关键词: 扫地机器人;控制;结构;清扫
目 录
绪论 1
1. 机器人简史 3
2. 应用机器人的意义 6
3. 本课题研究的内容 9
4. 扫地机器人总体方案结构的设计 12
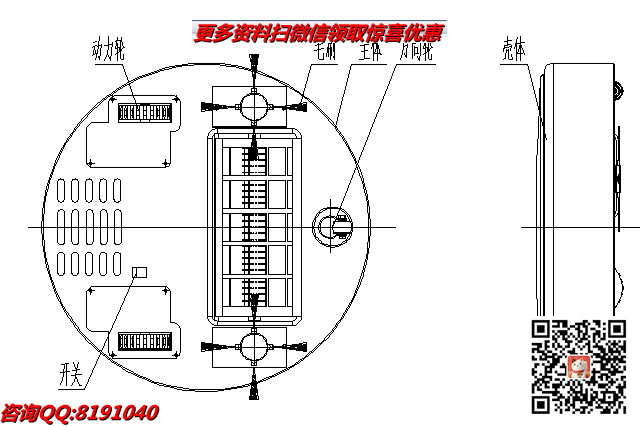
4.1 扫地机器人的总体方案图 12
4.2 扫地机器人的工作原理 12
5. 机械结构的设计 18
5.1电机的选型计算 20
5.2齿轮传动的设计计算 20
5.3扫地机器人的功能概述 20
5.3.1 扫地机器人的清扫模式 20
5.3.2 智能导航系统 20
5.4 齿轮的强度校核 20
5.5 扫地机器人的智能控制系统 20
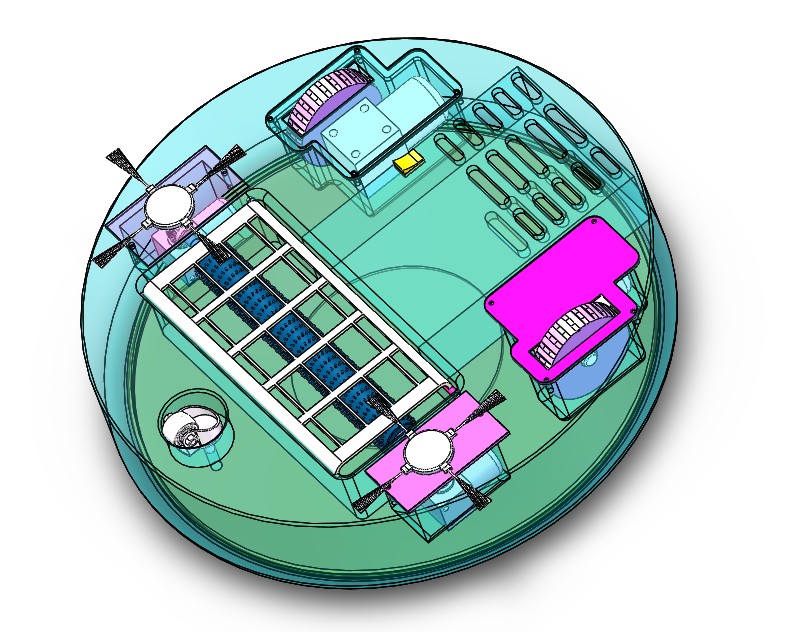
6. 扫地机器人的三维建模 21
6.1 动力轮的三维建模 21
6.2 万向轮的三维建模 22
6.3 毛刷的三维建模 23
6.4 扫地机器人的三维建模 22
7. 三维软件设计总结 22
结论 25
参考文献 26
致谢 27
本次设计的扫地机器人采取的方案是:在机器人的两侧各布置一组毛刷,成对称分布,通过电动机通过伞齿轮传动控制动力轮转动来实现机器人的移动动作。根据控制方法的不同,机器人的转速或者方向也有所不同。整机采用成本低廉且经久耐用的塑料作为材料,经过喷漆喷塑处理后在外观上面得到了一定的保证。其具体方案布局图如下: