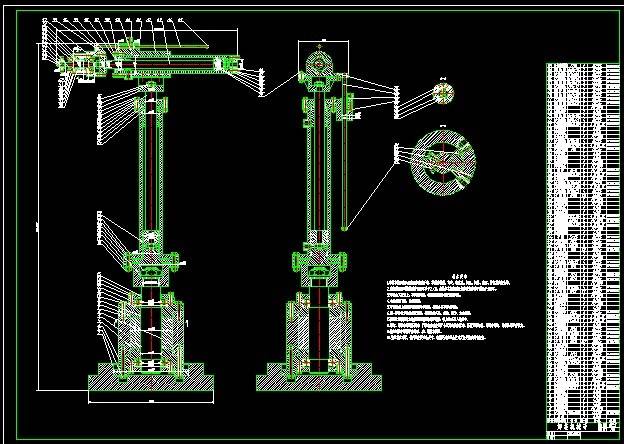
A0装配图.dwg
A1机身缸体.dwg
A1手臂导杆套.dwg
A2机身导杆套.dwg
A2机身托盘.dwg
A2机座回转轴.dwg
A2手臂托盘.dwg
A3手腕回转轴.dwg
液压.dwg
答辩PPT.ppt
焊接机械手的传动机构与控制系统设计.doc
在工业生产中,有不少工作会对工人身体产生不良影响,例如焊接工作。而焊接却是生产中必不可少的环节。随着科技的发展和工业需求的增加,焊接技术在工业生产中所占据的分量越来越大,而且焊接技术的优良程度直接影响着零件或产品的质量。国内焊接机器人应用虽已具有一定规模,但与我国焊接生产总体需求相差甚远。因此,大力研究并推广焊接机器人技术势在必行。
为了设计出可以投入生产应用的焊接机械手,通过查阅了相关参考资料,了解了国内外焊接机械手的发展现状,掌握了机械手的基本工作原理,进而对机械手传动机构进行设计计算和强度校核,利用CAD绘图软件绘制出结构图,并对液压驱动系统进行了仿真,最终设计出基本可投入生产应用的焊接机械手。
关键字:焊接机械手;机械机构设计;控制系统设计
2总体方案设计
2.1设计要求
进行生产线焊接机械手机构与控制电路设计。包括主要机构和传动系统设计:机械手支撑焊具的最大重量:10kg,焊具移动范围为半径为400mm的扇形区域,高度变化范围为:500mm。动力装置自定。如选用液压系统,要设计出液压系统图和相应电气控制系统。要求设计寿命10年。完成机体和传动机构的总体设计,并完成指定零件的零件图设计。进行必要零部件的受力分析与强度验算;绘制总装图和相关零件图。必要时进行优化设计和应力分析。在以上给定参数条件下,设计出应用标准元件最多,体积最小、机构最为合理、强度足够,基本能交付工程实际的设计资料。
2.2机械手的基本形式
机器人的结构形式主要有直角坐标式、圆柱坐标式、球坐标式、关节坐标式四种:
(1)直角坐标式机器人:这类机器人的空间运动是由三个互相垂直的直线运动组成,工作空间为长方体状空间。直角坐标式机器人一般能达到很高的定位精度,但相对而言,直角坐标式机器人的结构尺寸一般比另外几类机器人大,主要运用于装配和搬运工作。
(2)圆柱坐标式机器人:这类机器人的空间运动是由两个垂直运动和一个旋转运动组成,工作空间是一个圆柱状空间。圆柱坐标式机器人结构相对简单,定位精度一般,一般运用在搬运和部分焊接工作。
(3)球坐标式机器人:这类机器人的空间运动是由两个旋转运动和一个垂直运动组成,工作空间为类球状空间。球坐标式机器人结构简单且成本较低,但是定位精度较差,主要运用于搬运工作。
(4)关节坐标式机器人:这类机器人的空间运动是由三个旋转运动组成,工作空间比较大,可看作类似人的手臂的运动范围。关节坐标式机器人的结构紧凑,动作灵活,定位精度高,在工业生产中运用广泛,可运用于焊接,搬运,装配,喷涂等运动比较复杂的工作。关节坐标式机器人还分为垂直关节型和水平关节型两种。
2.3机械手的组成
机械手主要由执行机构、驱动机构和控制机构三部分组成。执行机构是用来执行机械手的工作如:抓取、焊接、搬运等,根据工作形式,执行器可能是手爪、焊具、吸盘等。驱动机构是驱动机械手完成各种转动、移动或复合运动来实现规定的动作,改变执行机构的位置和姿势。控制机构主要利用可编程序控制器、微型计算机等控制驱动机构动作,进而控制执行机构运动。一般机械手可分为:手部(执行器)、手腕、手臂、机身、机座(腰部)。
2.4机械手设计方案的选择
因为设计要求为一个半径为400mm,高度为500mm的半圆柱,所以选择圆柱坐标式机器人,具有四个自由度:机身升降,机座回转,手部伸缩,手腕回转。
运动简图如下:
图2.1 机械手运动简图
驱动机构是工业机械手的重要组成部分, 工业机械手的性能价格比在很大程度上取决于驱动方案及其装置。根据动力源的不同, 工业机械手的驱动机构大致可分为液压、气动、电动和机械驱动等四类。采用液压机构驱动机械手,结构简单、尺寸紧凑、重量轻、控制方便,驱动力大等优点。因此,机械手的驱动方案选择液压驱动。
本设计机械手回转运动采用单叶片摆动液压缸,平移运动采用伸缩液压缸实现。
2.5技术参数
用途:用于焊接工作;
自由度数:四个(手腕回转,手臂伸缩,机身升降,底座回转);
坐标形式:圆柱坐标系;
机身升降行程:;
手臂伸缩行程:;
手腕回转速度:;
手臂伸缩速度:;
机身升降速度:;
底座回转速度:;
手腕回转范围:;
底座回转范围: 。
目录
1绪论 1
1.1技术概述 1
1.2机械手的发展历程 1
1.3机械手在生产中的应用 2
1.4主要研究内容 2
2总体方案设计 4
2.1设计要求 4
2.2机械手的基本形式 4
2.3机械手的组成 5
2.4机械手设计方案的选择 5
2.5技术参数 6
3腕部结构的设计计算 7
3.1腕部设计的基本要求 7
3.2腕部的结构及选择 7
3.3腕部液压缸的设计计算 8
3.3.1腕部驱动力计算 8
3.3.2液压缸缸盖螺钉计算 10
3.3.3动片及定片的连接螺钉计算 11
3.4腕部液压缸轴承的计算 12
3.5其他零部件的选择 13
4手臂结构的设计计算 14
4.1手臂设计的基本要求 14
4.2手臂的结构及选择 14
4.3手臂液压缸的设计计算 15
4.3.1手臂工作负载 15
4.3.2液压缸内径的计算 16
4.3.3活塞杆的计算 16
4.3.4液压缸缸筒壁厚计算 17
4.3.5液压缸稳定性校核 18
4.3.6连接部件的强度计算 20
4.4手臂导杆的设计计算 20
4.5其他零部件的选择 21
5机身结构的设计计算 23
5.1机身设计的基本要求 23
5.2机身的结构及选择 23
5.3机身升降液压缸的设计计算 24
5.3.1升降液压缸工作负载 24
5.3.2升降液压缸内径的计算 25
5.3.3升降液压缸不自锁的条件分析 25
5.3.4升降液压缸活塞杆的计算 27
5.3.5升降液压缸缸筒壁厚计算 28
5.3.6升降液压缸稳定性校核 28
5.3.7连接部件的强度计算 30
5.4机身摆动液压缸的设计计算 32
5.4.1摆动液压缸驱动力计算 32
5.4.2摆动液压缸缸盖螺钉计算 34
5.4.3动片及定片的连接螺钉计算 36
5.5机身摆动液压缸轴承的计算 37
5.6机身导杆的设计计算 37
5.7其他零部件的选择 38
6液压系统设计 39
6.1设计的基本要求 39
6.2系统总体设计方案 39
6.3液压系统的设计计算 40
6.3.1流量的计算 40
6.3.2液压泵的设计 41
6.3.3液压泵型号的选择 41
6.3.4液压泵电机的确定 42
6.3.5油箱的容量计算 42
6.4液压系统图 43
6.5液压系统工作原理 43
6.6电气控制图 44
总结 45
参考文献 46
致谢 47
附录A 48