����װ��ͼ A0.dwg
����_A1.dwg
������̨_A2.dwg
��צ�н���Ȧ_A4.dwg
��צ�н���Ȧ_A4.dwg
��צ������_A4.dwg
��ת��_A2.dwg
����װ��ͼ_A0.dwg
�����_A1.dwg
ת�۰�_A4.dwg
װ��̨_A2.dwg
��ҵ���.ppt
��ҵ������ģ����հ汾������.doc
��ҵ������ģ����հ汾������.doc
������Ҫ�ӻ�е�ֵ�����ϵͳ������ϵͳ�ȼ�������������ϻ�е�ֽ��������롢��ϸ��ϵͳ���о���ͨ���о���ʵ���˻�е�ֵ��Զ����ֶ��������ܣ������˽����Ͷ�ǿ�Ⱥ��������Ч�ʵ�Ҫ����������������ߵ��Զ���ˮƽ�Լ��������췽�����˲�����������á�
������������ϵͳ��Ʒ��棬���ȶԻ�е�ֽ����˼��˶�������Ȼ�������ϵͳ�����˷����о���ϸ�µķ������������Ҫ����������ѡ�͡�
�������ڿ���ϵͳ����Ʒ��档���ȶԻ����˵Ŀ���ϵͳ�����˷����������о��˿���ϵͳ��Ӳ���ṹ��������Ӳ���ṹͼ��Ȼ����ݲ�����Ҫ������˿�����壬ȷ���˽��߷�ʽ���о����˶����Ƶ�ʵ�ַ���������PLC���书��ģ�������ѡ�ͣ�����I/O�ӿڽ��������úͶ�PLC����λ��ģ�����Ƚ����˱��ơ�
������ͨ��������ƶ����漰��֪ʶ���˸��������գ���ʵ�û��ļ����������˸������˽⡣֪����Ƶķ��������ȥ�������ϣ�����ȥ������⣬Ϊ�Ժ��������ƽ��·��
�����˵ķ���Ŀǰ��������Դ��ڷ�չ�εĻ����˻�û��ͳһ�ķ���������������¼��ַ������
����1����ʹ�÷�Χ����
����(1)�̶������ר�û�����(��е��)ͨ�������������ض�Ҫ����Ƴɹ̶������Ŀɱ����)�����ֻ�����(��е��)��Ϊ������Һ�����г̿��ء���е�����������乤��λ�á���������һ�����Ͻṹ��ϵͳ�۸��������Ӧ�á�
(2)�ɱ�����ͨ�û����˹�������ɱ䣬����Ӧ��ͬ�Ĺ�������ͨ����ǿ���ʺ����Զ�Ʒ�֡���С��������Ϊ�ص����������ϵͳ�С�
2����ʹ����ҵ�����ź���;����
(1)��ҵ�����������ֿɰ���ҵ����Ϊ��ѹ�����ӡ�������Ϳ��װж��װ�䡢���Ȼ����ˡ�
(2)�ɾ�������纣��̽������˵ȡ�
(3)������;������
�ڿ����͵ľ��»�У������˲������ɽ����ս����Щ�����˾��н�ǿ��������ս�Ͳ������ʹ�������������Ǽ�����������֯���գ��ж���ݣ�Ч�����ԡ����Ǻͻ����˲��ӵ����������ߵ��ǻۡ�˼�롢��ƺ�����ֲ����ġ����������Ż�������½�������ա��졢��ս���ij������οռ���ȫ���Ͷ����»��ҲΪ�쵼��Щ�����˲��ӵ������ָ�ӻ���������ս��Ա���������µġ��漰����ζԴ���������Ϊ�ĸ�������
(4)�����������ҽ�ƻ����ˡ����û����ˡ���ѧ�����˵ȡ�
3������е�ṹ������ϵ�ص����
����������е�ṹ������ϵ�ص�ɷ�Ϊֱ�������͡�Բ�������͡��������͡���ؽ��͵ȡ���Щ���÷�ʽ���Ǿ���ʵ��֤��Ϊ���ÿ��еķ�ʽ��Ҳ�����ʽģ�黯��ҵ�������������÷�ʽ���ʱ��Ҫ����Ͳ��յķ�ʽ��
(1)ֱ�������ͻ�����
���˶��������������ֱ��ֱ���ƶ�(��PPP)��ɣ��乤���ռ�ͼ��Ϊ�����Ρ����ڸ���������ƶ����룬���ڸ�����������ֱ�Ӷ�����ֱ����ǿ������λ�ú���̬�ı�̼��㣬��λ���ȸߣ���������ϣ��ṹ����������ռ�ռ����������ΧС������Բ����������ҵ������Э��������
����(2)Բ�������ͻ�����
���˶���ʽ��ͨ��һ��ת���������ƶ���ɵ��˶�ϵͳ��ʵ�ֵģ��乤���ռ�ͼ��ΪԲ����ֱ��������ҵ��������ȣ�����ͬ�Ĺ����ռ������£�������ռ���С�����˶���Χ����λ�þ��Ƚ�����ֱ�������ͻ����ˣ�����������ҵ������Э��������
ͼ1.2 Բ�������ͻ�����
���� (2)��������ҵ������
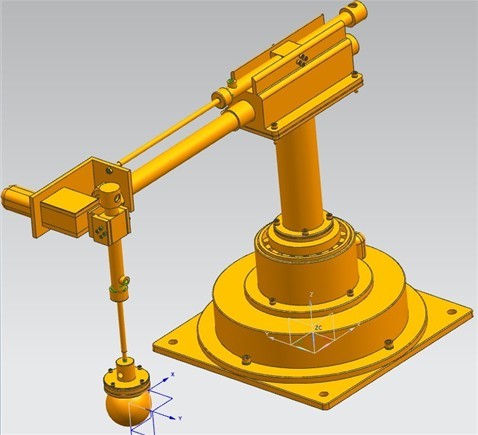
�������ֳƼ�������ҵ�����ˣ����ֱ۵��˶�������ת����һ��ֱ���ƶ�(��RRP)һ����ת��һ��������һ�������˶�����ɣ��乤���ռ�Ϊһ���壬�����������¸�����������ץȡ�����ϻ�̵�λ�õ�Э����������λ�þ��ȸߣ�λ�������۳������ȡ�
����(3)��ؽ���ҵ������
�������ֳƻ�ת������ҵ�����ˣ����ֹ�ҵ�����˵��ֱ�����һ����֫���ƣ���ǰ�����ؽ��ǻ�ת��(��RRR)���ù�ҵ������һ���������ʹ�С����ɣ��������ۼ��γɼ�ؽڣ���ۺ�С�ۼ��γ���ؽڣ���ʹ�������ת�˶������ڶ���С���������ڶ�����ṹ����գ�����Դ�ռ�������С������������ҵ������Э����������λ�þ��Ƚ̵ͣ���ƽ�����⣬������ϣ����ֹ�ҵ������Ӧ��Խ��Խ�㷺��
����(4)ƽ��ؽ���ҵ������
������������һ���ƶ��ؽں�������ת�ؽڪ���PRR�����ƶ��ؽ�ʵ�������˶�����������ת�ؽ������ǰ�������˶���������ʽ�Ĺ�ҵ�������ֳƪ�SCARA(Seletive Compliance Assembly Robot Arm)װ������ˡ���ˮƽ�����������˳�ԣ����ڴ�ֱ�������н̴�ĸ��ԡ����ṹ��������������װ����ҵ�У��ر��ʺ�С�������IJ��װ�䣬���ڵ��ӹ�ҵ�IJ�ӡ�װ����Ӧ�ù㷺��ͨ���Գ������÷�ʽ(����������)�Ļ����˵��˶������ɿ����������㣺
����1)���������ɷֽ�Ϊ��������������������ת������ת������ת�Ȫ���
����2)�����˶���ʽ�ɷ�Ϊֱ���˶�����ת�˶����ࡣ��������������ƻ�����ʱ���ɳ�������ܹ�ʵ��ֱ���˶�����ת�˶���ͨ�ò���(����Һ�����)�����й�����ϣ�Ҳ����˵���Ծ�������ѡ���ͨ�ò�����Ϊģ�������м��ɡ���Щ����������Ϊһ�������Ļ���ģ�飬Ҳ���Խ������������Ϊһ������ģ�顣��Ȼ�����÷�ʽӦ���ݲ�Ʒ����ʵ�ֵĹ���Ҫ����ȷ����ͬ����ģ��ķֽ�Ҳ�ǻ��ڲ�ƷӦ����Ĺ���Ҫ���µ�ģ��ֽ⡣
4�����������˶����Ʒ�ʽ����
(1)��λ����(PTP)�����˾����ɵ㵽��Ŀ��Ʒ�ʽ�����ֿ��Ʒ�ʽֻ����Ŀ��㴦ȷ���ƻ�����ĩ��ִ������λ�ú���̬�����Ԥ���IJ���Ҫ��ĿǰӦ�õĹ�ҵ�������У��ܶ������ڵ�λ���Ʒ�ʽ�ģ��������ϰ��˻����ˡ��㺸�����˵ȡ�
(2)�����켣����(CP)�����˻����˵ĸ��ؽ�ͬʱ���ܿ��˶���ȷ���ƻ�����ĩ��ִ������Ԥ���Ĺ켣���ٶ��˶������ܿ���ĩ��ִ���������߹켣�ϸ������̬������������ͼ������˵Ⱦ��������켣���Ʒ�ʽ��
5����������ʽ����
��������ʽ�ɷ�ΪҺѹ����ʽ������ʽ����������ʽ(����Ŀǰ�õ�����һ��)��
6�����ݻ����˵Ĺ���ˮƽ�ͼ������Ƚ��̶Ȱ�“��”����
(1)��һ�����������ص��Dz��ÿ��������ƣ�ʾ�����ֿ��ƻ����ֿ��ƣ�����ҵ·�����˶�������ͨ��ʾ�̻��̸�����60�����������ҵ��ʵ��Ӧ�õľ��������ҵ�����˶����ڵ�һ�������ˣ��������ɱ����(����������)�Ĺ�ҵ�����ˣ����м���װ�õ�ʾ�������ͻ����ˣ������Ͱ��˻����˵ȡ�
(2)�ڶ�����������70�����ʼ���ֵģ��似���ص��Dz��ü����ֱ�ӿ��ƣ���
ͨ�������Ӿ���������������ʹ���������“�о�”�����Ϣ��ͨ����������м���ͷ����Զ��ؿ��Ʋ����������˶��Ͳ�������ˣ�����Ʒ�ʽ�ϵ�һ��������Ҫ���ӵö࣬Ŀǰ����������ѿ�ʼ�ڹ�ҵ���������վ��ֵȳ���Ӧ�ã����������ռ��Ρ�
(3)�����������˼����ܻ����ˡ����ǹ��������ڻ����о��������ĸ������ˣ�����Ҫ�ص��Ǿ����˹����ܡ�����:ģʽʶ���������滮����������֪ʶ�⡢ר��ϵͳ���˻����������ȡ���һ�������Ŀǰ�����о�����֮�С�
Ŀ¼
��һ�� ���� 1
1.1 ���� 1
1.2 ���˻�е�ֵ�Ӧ����״ 1
1.3 ��е�ֵ�Ӧ������ 2
1.4 ��е�ֵĹ��ɺͷ��� 3
1.4.1��е�ֵĹ��� 3
1.4.2��е�ֵķ��� 4
�ڶ��� �����ϻ�е����ѹϵͳ���۷����ͼ��� 9
2.1��ѹ����ϵͳ��Ƽ��� 9
2.1.1ȷ����ѹϵͳ�������� 9
2.1.2���ƻ�е����ѹϵͳ����� 10
2.13ȷ��Һѹϵͳ����Ҫ���� 11
2.14ȷ��Һѹϵͳ����Ҫ���� 12
2.2���ѡ���йز������� 15
2.3 ������ 17
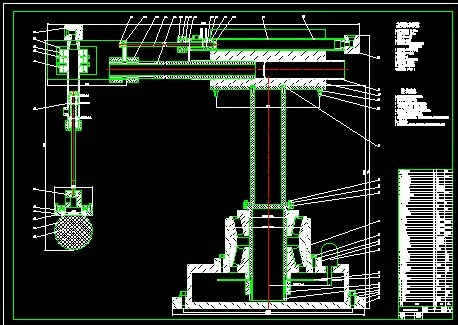
������ ��е�ֵ����巽����� 18
3.1 ��е�ֵ����з������������ 18
3.1.1��е�ֵ����з��� 18
3.1.2��е�ֵ��㲿��ѡ�� 21
3.1.3��е�ṹ��� 21
3.2������ 24
������ �����ϻ�е�ֵĿ���ϵͳ 25
4.1 PLC����ϵͳ��ƵIJ��� 25
4.2 ����ϵͳ��Ҫ�� 25
4.3 ����ϵͳ��ԭ�� 29
4.3.1 ϵͳԭ��ͼ 29
4.3.2�������� 31
4.3.3�������� 32
4.3.4ѡ������ģʽ���� 33
4.3.5��е���Զ����г��� 33
4.3.6��е���ֶ����г��� 34
4.3.7ϵͳ�������� 35
4.3.8ֹͣ���� 35
4.3.9����� 37
4.4 ������ 37
������ �ܽ� 38
����� 39
��л 40
��¼ 41