在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,机械手作为自动化生产线上的重要成员,逐渐被企业所认同并采用。机械手的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,机械手主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
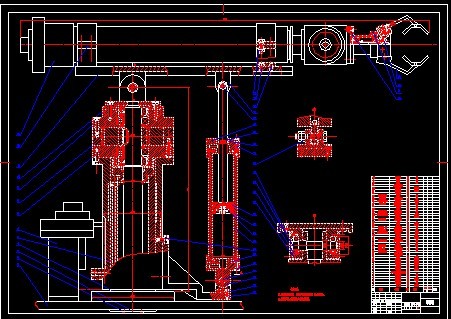
本文将设计一台四自由度的机械手,主要的功用就是自动换刀。首先,本文将设计机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;在此基础上,本文将设计该机器人的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,重点加强控制软件的可靠性和机器人运行过程的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修改程序、设置参考点和回参考点。
各类半自动车床,有自动加紧、进刀、切削、退刀和松开的功能,单仍需人工上下料;装上机械手,可实现全自动化生产,一人看管多台机床。目前,机械手在这方面应用很多,如上海柴油机厂的曲拐自动车床和座圈自动车床机械手,大连第二车床厂的自动循环液压仿行车床机械手,沈阳第三机床厂的Y38滚齿机械手,青海第二机床厂的滚铣花键机床机械手等。由于这方面的使用已有成功的经验,国内一些机床厂已在这类产品出厂是就附上机械手,或为用户安装机械手提供条件。如上海第二汽车配件厂的灯壳冲压生产线机械手(生产线中有两台多工位机床)和天津二注塑机有加料、合模、成型、分模等自动工作循环,装上机械手的自动装卸工件,可实现全自动化生产。目前机械手在冲床上应用有两个方面:一是160t以上的冲床用机械手的较多。如沈阳低压开关厂200t环类冲床磁力起重器壳体下料机械手和天京拖拉机厂400t冲床的下料机械手等;其一是用于多工位冲床,用作冲压件工位间步进轻局技术研究所制作的120t和40t多工位冲床机械手等。
1.5.3 铸、锻、焊热处理等热加工方面
模锻方面,国内大批量生产的3t、5t、10t模锻锤,其所配的转底炉,用两只机械手成一定角度布置早炉前,实现进出料自动化。上海柴油机厂、北京内燃机厂、洛阳拖拉机厂等已有较成熟的经验。
1.6 机械手的组成
工业机械手由执行机构、驱动机构和控制机构三部分组成。
1.6.1 执行机构
(1)手部 既直接与工件接触的部分,一般是回转型或平动型(多为回转型,因其结构简单)。手部多为两指(也有多指);根据需要分为外抓式和内抓式两种;也可以用负压式或真空式的空气吸盘(主要用于吸冷的,光滑表面的零件或薄板零件)和电磁吸盘。
传力机构形式教多,常用的有:滑槽杠杆式、连杆杠杆式、斜槭杠杆式、齿轮齿条式、丝杠螺母式、弹簧式和重力式。
(2) 腕部 是连接手部和臂部的部件,并可用来调节被抓物体的方位,以扩大机械手的动作范围,并使机械手变的更灵巧,适应性更强。手腕有独立的自由度。有回转运动、上下摆动、左右摆动。一般腕部设有回转运动再增加一个上下摆动即可满足工作要求,有些动作较为简单的专用机械手,为了简化结构,可以不设腕部,而直接用臂部运动驱动手部搬运工件。
目前,应用最为广泛的手腕回转运动机构为回转液压(气)缸,它的结构紧凑,灵巧但回转角度小(一般小于 2700),并且要求严格密封,否则就难保证稳定的输出扭距。因此在要求较大回转角的情况下,采用齿条传动或链轮以及轮系结构。
(3)臂部 手臂部件是机械手的重要握持部件。它的作用是支撑腕部和手部(包括工作或夹具),并带动他们做空间运动。
臂部运动的目的:把手部送到空间运动范围内任意一点。如果改变手部的姿态(方位),则用腕部的自由度加以实现。因此,一般来说臂部具有三个自由度才能满足基本要求,即手臂的伸缩、左右旋转、升降(或俯仰)运动。
手臂的各种运动通常用驱动机构(如液压缸或者气缸)和各种传动机构来实现,从臂部的受力情况分析,它在工作中既受腕部、手部和工件的静、动载荷,而且自身运动较为多,受力复杂。因此,它的结构、工作范围、灵活性以及抓重大小和定位精度直接影响机械手的工作性能。
(4) 行走机构 有的工业机械手带有行走机构,我国的正处于仿真阶段。
1.6.2 驱动机构
驱动机构是工业机械手的重要组成部分。根据动力源的不同, 工业机械手的驱动机构大致可分为液压、气动、电动和机械驱动等四类。采用液压机构驱动机械手,结构简单、尺寸紧凑、重量轻、控制方便。
1.6.3 控制系统分类
在机械手的控制上,有点动控制和连续控制两种方式。大多数用插销板进行点位控制,也有采用可编程序控制器控制、微型计算机控制,采用凸轮、磁盘磁带、穿孔卡等记录程序。主要控制的是坐标位置,并注意其加速度特性。
1.7 课题工作要求
技术要求:
结构型式: 组合式──直角坐标加旋转;
自由度数: 4;
负载重量: 10 kg (单爪)
末端操作器: 双手爪
工作空间: 纵向 11m; 横向 0.6m; 升降 1m; 旋转 180º;
运行速度: 五档可调;
最大运行速度: 纵向 33.6 m/min; 横向 16 m/min;
升降 8m/min; 旋转 16 rpm;
重复定位精度: ±0.6 mm;
记忆刀位数: 不小于 170 把,可扩展;
总重量: ≯600 kg.
第1章 引言 3
1.1机械手分类.3
1.2机械手的组成 6
1.3 应用机械手的意义 9
1.4 机械手的现状 9
1.5 工业机械手在生产中的应用 12
1.6机械手的组成 13
1.7 课题要求 14
第2章机械手的结构设计 16
2.1手部结构 16
2.1.1手部设计基本要求 16
2.1.2典型的手部结构 16
2.1.3机械手手抓的设计计算 16
2.1.4 机械手手抓夹持精度的分析和计算 21
2.1.5弹簧的计算 21
2.2 系统的组成 23
2.3 总体技术方案 23
2.4腕部结构的设计 24
2.5 臂部 30
2.5.1臂部的结构形式 30
2.5.2臂部机构的导向装置 31
2.6 机械手机身的设计计算 33
2.6.1机身的整体设计 34
2.6.2机身回转机构设计的计算 35
2.6.3机身升降机构计算 38
2.6.4轴承选择分析 41
2.7 驱动方式 42
2.8 传动方式 43
2.9 制动器 45
设计小结 47
致谢 48
参考文献 49
附录1 50
附录2 54
臂部装配图.dwg
底座.dwg
法兰盘.dwg
机身装配图.dwg
机械手支座.dwg
机械手装配图.dwg
自动换刀装置的总体装配图.dwg
换刀机械手设计.doc
目录.doc