

- ·上一篇文章:基于光流聚类与核线约束的车载序列全景影像匹配
- ·下一篇文章:土地利用数据库更新方法研究与实现
基于点云的隧道三维重建方法研究
-
论文代写发表联系:
QQ212181988
一键分享拿折扣:
三维重建技术一直是测绘学和计算机图形学的研究热点,而重建高质量的三维模型是近年的研究难点。本文以隧道点云为对象,对两种基于点云的三维重建方法展开了研究,对部分三维重建过程进行了优化,目的是得到质量更高的三维模型。本文主要的研究工作如下:
1、隧道空间点云获取及预处理。受益于近年来移动测量技术的快速发展,本文课题的隧道数据由移动式隧道测量系统采集得到。但系统采集的原始数据是每个扫描面的极坐标点、里程值、姿态角等信息,为此,本文进行了坐标转换和坐标系统一的工作,获取隧道空间点云模型。
2、研究了一种基于柱面投影的隧道空间三角网格重建算法。首先,将隧道空间点云投影到它拟合的圆柱面,再将柱面展开得到的平面点进行Delaunay三角化,最后保持平面Delaunay三角网的连接关系映射回三维空间。另外,本文从数据优化的角度,在空间点云柱面投影之前添加了隧道主体点云提取的工作。
3、提出了一种隧道空间三角网格的优化方法。基于柱面投影的三角网格重建方法本身存在着缺陷,由于投影过程中丢失第三维信息,导致生成的隧道空间三角网格质量不高,甚至存在畸形三角形。对此,首先将原隧道空间三角网的柱面展开,同时保留每个顶点的深度信息。然后给出了一套相应的网格优化方案,包括最小法向量偏差的优化准则和利用翻边操作的空间形状优化方法。最后将优化的展开三角网格映射回三维,得到优化后的隧道空间三角网格。
4、介绍了一种基于网格优化的隧道NURBS曲面重建方法。第一步,隧道截面点云提取;第二步,对截面点云进行NURBS曲线拟合;第三步,利用蒙面法将这组的截面曲线组成一张NURBS曲面。其中,本文提出了一种改进的隧道截面点云提取方案,利用之前网格重建的研究成果,将截平面与优化后的隧道空间三角网格进行相交运算,以此提取截面点云。通过提高截面点云质量,也提高了NURBS曲面模型的质量。
最后,依据以上研究方法和改进思路,进行了实验和效果比较分析,验证了本文方法的可行性和有效性。
关键词:柱面投影;三角网格重构;空间形状优化;NURBS曲面重建
目录
摘要 I
ABSTRACT II
1 绪论 1
1.1 研究背景及意义 1
1.1.1 三维重建方法及应用 1
1.1.2 移动式隧道测量系统 2
1.2 国内外研究现状 3
1.2.1 三角网格重建与网格优化 3
1.2.2 参数曲面重建与NURBS曲面 4
1.3研究内容及安排 5
2 基于柱面投影的隧道空间三角网重建 7
2.1隧道空间点云获取 7
2.2 圆柱面拟合与隧道主体点云提取 9
2.2.1 点云圆柱面拟合 9
2.2.2 参考柱面的隧道主体点云提取 12
2.3空间点云柱面展开与平面三角剖分 13
2.3.1 以柱面为基准的空间点云平面化 13
2.3.2 平面Delaunay三角剖分 14
2.4网格映射与空间三角网建立 16
2.5本章小结 17
3 考虑柱面深度的隧道空间三角网格优化 18
3.1 高质量三角网格与网格优化 18
3.1.1 高质量三角网格 18
3.1.2 三角网格优化方法 19
3.2 三角网格拓扑优化技术 23
3.2.1 三角网格拓扑优化准则 23
3.2.2 三角形形状优化与空间形状优化 25
3.3 考虑柱面深度的隧道三角网格空间形状优化 26
3.3.1 考虑深度信息的三角网柱面展开 27
3.3.2 最小法向量偏差的优化准则 27
3.3.3 局部翻边的空间形状优化 28
3.4本章小结 29
4 基于网格优化的隧道NURBS曲面重建 30
4.1 利用网格优化的隧道截面点云提取 30
4.2 隧道截面点云的NURBS曲线拟合 31
4.2.1 B样条曲线与NURBS曲线 31
4.2.2 三次NURBS曲线的插值拟合 33
4.3 蒙面法生成隧道NURBS曲面 35
4.3.1 NURBS曲面表示方法 35
4.3.2 蒙面法生成隧道NURBS曲面 35
4.4 本章小结 36
5 实验过程与分析 37
5.1 隧道点云获取与预处理 37
5.2 基于柱面投影的隧道三角网重构 38
5.3 隧道空间三角网格优化 41
5.4 隧道的NURBS曲面模型重建 44
5.5本章小结 47
6 总结与展望 48
6.1 全文工作总结 48
6.2 全文工作展望 48
参考文献 49
致谢 51
重建出逼真的三维模型,首先要获取到真实物体中人类所感知的信息。这些信息包括三维几何形状、透明程度、颜色和纹理等表面特征信息。根据这些信息获取方式的不同,可以将三维重建方法分为三种:
①基于实体造型的三维重建方法。通过建模软件(如AutoCAD,3dMAX、Maya 等)直接生成和编辑得到的三维模型,一般可以对一些基本几何体直接编辑和组合,方便灵活,在游戏行业的动画模型建立和影视业的三维特效表达等地方有较好的应用。但对外形复杂、细节程度比较多的物体,比如雕刻、人脸、树木、艺术文物等,模型的真实感较差,很难实现逼真精确的重建;而且,重建过程比较费时,时间成本太高。
②基于图像的三维重建方法(Lensch et al.2003)。通过一组真实物体的二维图像,来得到三维模型的方法。这种方法的优点是,硬件成本较低,数据获取较为灵活。但存在着许多问题,拍摄过程中,色彩很容易受到当时环境影响而不真实。另外在没有第三维度的条件下,从二维图像来反求三维数据的算法往往比较复杂,而且存在很大的误差,一般情况下,最终模型的精度并不能达到要求。因此,基于图像的三维重建虽然有很多的优点,但由于算法复杂,难度较高,得到模型的精度和细节不足,使得无法对细节丰富的物体进行重建(胡国飞,2005)。
③基于点云的三维重建方法(Vosselman et al.2001)。通过测量设备获取物体表面的点数据,称为点云,通过对点云进行处理来表达物体的三维模型。其中,一组点云就是空间坐标点的信息集合,可包含物体表面点的各种属性信息,如点的几何坐标、尺寸、法线、色彩、透明程度、纹理等。点云是普遍存在于真实世界的每个物体,可以比二维图像记录更多更真实的三维感知信息。因此,基于点云的三维重建技术发展成为三维重建的主要方法之一。
三维重建的热门研究领域有测绘学、计算机辅助几何设计、计算机图形学、计算机视觉、虚拟现实、计算机动画等。因此,三维重建应用也涉及人们物质生活和精神生活的各个层面,主要有:
①智慧城市建设(Komninos et al.2013)(Prandi et al.2014)。以“智慧深圳”为例,已利用三维重建技术完成深圳大部分街道的真实场景再现和网络发布。深圳城市真实场景的几何建模与可视化,完善了城市的基础信息建设,给市民日常生活带来更多的便捷和全新的体验,从而推动了“智慧深圳”的建设进程。
②逆向工程(Varady,1997)(金涛等,2003)。又称反求工程,主要包括实体的数字化采集、几何建模(三维重建)和模型制造等多种技术。主要用于工业生产,在缩短产品设计时间,提高产品制造效率方面有非常大的优势,也符合社会生产和发展的需要,因此逆向工程的水平也是一个国家的制造业实力的体现,是国家经济发展的重要科技力量。
③影视游戏。随着人们对3D电影和游戏等娱乐需求的不断扩大,在3D电影或游戏中,通过为虚拟角色建立逼真的动作、表情和外形来增强其真实感。比如近期的电影《疯狂动物城》就采用了三维重建技术来模拟虚拟角色,不仅可以降低电影制作成本,还可以打造更丰富的视觉效果。
④文物保护与修复(赵煦等,2008)。例如,对珍贵的古代雕塑进行激光扫描来重建真实模型(林鹏等,2014);对考古遗迹三维数字化,可提供在线观看,不仅可以对文物长期保存,还可以对文物缺失破损部位进行数字化修复,还原文物的原始形态。
由此可见,三维重建技术是各行业的核心技术之一,具有广泛的应用价值,也一直是各领域的研究热点。
隧道三维重建在隧道工程中有着广泛的应用,如隧道三维信息数字化、隧道量测、隧道检测和监测、隧道火灾模拟、隧道照明模拟等。但基于点云的隧道三维重建算法,在重建速度、适用性和稳定性方面都有着不可避免的缺陷,很难满足人们对高质量三维模型的要求。
研究内容及安排
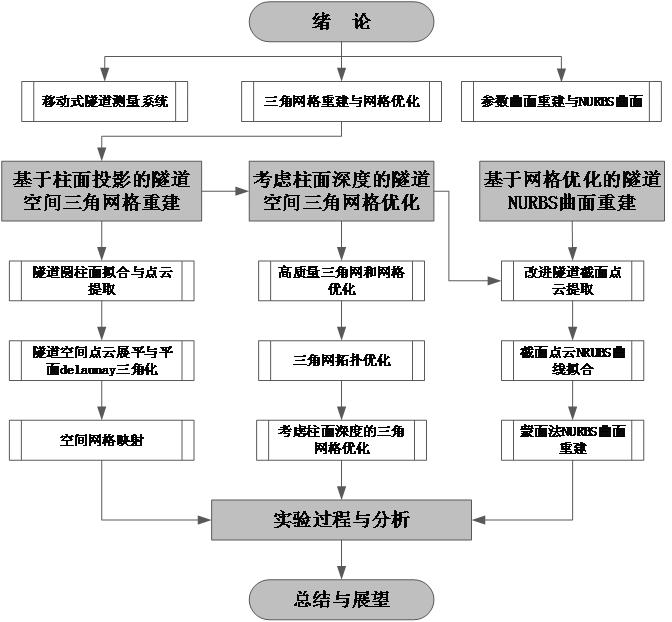
随着移动测量技术的普及和快速发展,使得获取实物表面的三维点云非常快速,而基于点云的三维重建仍是技术难点。本文首先进行了隧道空间点云获取与预处理工作,然后选取两种基于隧道点云的三维重建方法进行深入研究。为了得到高质量的隧道三维模型,本文展开了三方面的研究:首先研究了一种高效的基于柱面投影的空间三角网格重建算法,然后提出了一种隧道空间三角网格的优化方案,最后研究了一种基于截面线的隧道NURBS曲面重建方法,并改进了截面点云提取方法。本文技术路线如图1.1所示:
图1.1 论文技术路线流程图
全文可分6章,各章主要内容如下:
第1章,主要阐述了课题研究的背景和意义,总结了基于点云的三维重建技术的研究现状,主要包括三角网重建方法和参数曲面重建方法。讲述了移动测量技术在隧道点云获取中的巨大优势,指明了本文课题的数据来源。最后,指明了了本文的研究目的和技术路线。
第2章,介绍了隧道空间点云获取工作和研究了一种基于柱面投影的隧道空间三角网格重建方法。整章详细分析了此算法的流程及实现原理。出于数据优化的目标,在原算法基础上添加了隧道主体点云提取的过程。
第3章,提出了一种隧道空间三角网格优化方案。由于算法固有缺陷,导致三角网格畸变,提出了相应的网格优化方案。主要是在柱面投影的过程中保留第三维的深度信息,给出了相应的优化指标和空间形状优化操作方法,得到了更高质量的三角网格。
第4章,对隧道参数曲面重建方法进行了研究,介绍了一种基于网格优化的隧道NURBS曲面重建算法。采用先得到隧道截面点云,进行各截面点云的NUBRS曲线拟合,最后通过蒙面法来得到整张NUBRS曲面。改进了传统的截面点云提取技术,选用第3章优化后的网格与截面相交得到的点作为截面点云。通过提高截面点云质量,也提高了NURBS曲面模型的质量。
第5章,本文方法的详细实验过程和结果分析。包括隧道点云的预处理、第隧道空间三角网格建立、网格优化、NURBS曲面重建的详细实验过程,并分别进行了比较分析。
第6章,对本文研究工作进行了总结,并对下一步的研究做出了展望。
全文工作总结
本文以隧道点云为对象,对两种基于点云的三维重建方法展开了研究,对部分三维重建过程进行了优化,目的是得到更高质量的三维模型。具体研究过程工作主要如下:
1、首先是隧道点云获取与预处理。对移动式隧道测量系统采集到的原始数据,进行坐标统一得到隧道空间点云模型。并对隧道点云进行了点云分块和点云去噪等预处理。
2、研究了一种基于柱面投影的隧道空间三角网重建算法。并在原算法基础上添加了隧道主体点云提取工作。实验证明了此算法将复杂的空间三角网剖分,转化为简单的平面三角网剖分,具有易实现和效率高的优点,得到了较好的隧道主体空间三角网格。但由于算法本身缺陷,模型存在畸形三角形。
3、对隧道三角网格进行了空间形状优化。本文给出了一套相应的网格优化方案,首先将隧道空间三角网格以柱面基准展开,同时保留深度信息,然后对展开的三角网进行空间形状优化,有最小法向量偏差的优化指标和局部三角形翻边操作,最后再将优化的展开三角网空间映射得到新的隧道空间三角网格。实验结果比较分析,证明了本文算法的合理性,对原有隧道空间三角格中的畸形三角形进行了优化,提高了隧道空间三角网格的质量。
4、详细介绍了一种基于网格优化的隧道NURBS曲面重建方法。对传统的隧道截面点云提取技术进行了改进,利用之前网格重建的研究成果,将截平面与优化后的隧道空间三角网格进行相交运算,以此提取截面点云。通过提高截面点云质量,也提高了NURBS曲面模型的质量。实验表明此方法得到的隧道模型具有数据量小、形状规则等优点。
6.2 全文工作展望
基于点云的三维重建一直是各领域中的研究难点,而重建高质量的三维模型则是研究难点。本文的研究方法和改进方案仍然存在着诸多不足:
1、由于采集系统的硬件条件有限,本文使用的点云精度需要有所提高。
2、隧道形状较为规则,本文的两种三维重建方法较为合适。而对其他较为复杂形状的点云数据,这两种算法流程可能不适合。
3、提出的网格空间形状优化方案,需要得到柱面基准。当空间三角网格模型无法得到合适的基准面,则可能无法进行优化。
总之,本文方法可能不适用其他复杂的点云模型,但逻辑明确合理,而且改进方案简单有效,有一定的研究价值。今后以重建高质量三维模型为研究目标,住适用复杂点云的研究方向拓展。另外,对参数化曲面重建的研究不够深入,今后会继续学习,希望得到更好的创新成果。
Tags:
作者:佚名
- 好的评价 如果您觉得此文章好,就请您
0%(0) 

- 差的评价 如果您觉得此文章差,就请您
0%(0) 