

- ·上一篇文章:集成RTK和全站仪的近景摄影测量方法研究
- ·下一篇文章:基于光流聚类与核线约束的车载序列全景影像匹配
基于机载LiDAR数据建筑物规则化重建研究
-
论文代写发表联系:
QQ212181988
一键分享拿折扣:
摘 要
机载LiDAR技术是摄影测量与遥感领域的新兴技术,它高度集成了激光测距仪、全球卫星导航系统(Global Navigation SatelliteSystem,GNSS)与惯性测量单元(Inertial Measurement Unit,IMU),相比传统摄影测量技术,它具有较强的植被穿透性、更短的作业周期以及更低的生产成本;它作为一种主动式测量技术,不受日照和天气条件的影响,能够实现全天候全天时对地观测。该技术可广泛应用于地形测绘、海洋探测、城市建模、资源勘察、森林调查等领域。基于机载LiDAR数据建筑物重建是其主要应用方向之一,建筑物的信息是构建三维城市的组成因素,而三维城市是保障环境监测、城市变化监测、社会基础设施以及城市规划能够稳定发展的重要手段,所以获得高精度的三维城市模型显得尤为关键,本文以建筑物重建为目标,重点研究机载LIDAR信息特点与处理方法,从建筑物点云提取、建筑物点云分割与建筑物重建这3个方面展开深入研究。论文研究的主要成果和创新点如下:
1.阐述了利用机载LiDAR数据进行建筑物重建的研究背景与意义,梳理并分析了与该技术相关的国内外研究现状和存在的问题。
2.介绍机载激光雷达的系统组成、原理、数据特点;同时也对机载激光雷达滤波和分类的相关概念进行了简单的描述,并基于不规则三角网算法进行建筑物点云提取。提取之后的建筑物点云利用KD-Tree进行所有建筑物的点群分割。
3.介绍点云分割的定义、分割方法分类以及在现有常用的平面分割方法的基础之上,提出采用KD-Tree对点云进行管理,使用协方差分析法估计法向量和曲率,基于区域增长的粗分割方法和基于RANSAC平面拟合的精分割方法实现点云平面分割,然后通过屋顶面相交方法提取屋脊线和屋脊点,此方法具有较高的定位精度,且有一定的抗噪性和稳健性。
4. 用Alpha-shape方法检测建筑物边缘点,用改进的管子算法和最小二乘拟合直线的方法对建筑物进行轮廓线提取,并对建筑物的轮廓线进行了分组轮廓线规则化处理。
5.提出了基于利用带约束条件的Delaunay三角构网来构建建筑物模型重建方法,实验表明该方法能够实现多种结构建筑物的模型重建,重建效果与TerraSolid软件相当。
关键词:机载LIDAR;点云分割;轮廓线;规则化;模型重建;
目 录
摘 要 I
ABSTRACT II
1 绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状 2
1.2.1 建筑物提取技术 2
1.2.2 建筑物重建技术 5
1.3 研究内容与论文组织 7
1.3.1 论文研究内容 7
1.3.2 论文的组织 7
2 LiDAR点云中建筑物点云提取 9
2.1 机载LIDAR简介 9
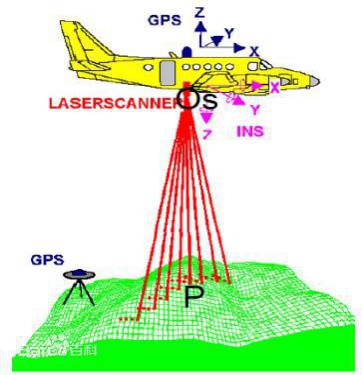
2.1.1 机载激光雷达系统组成 9
2.1.2 机载激光雷达对地定位原理 11
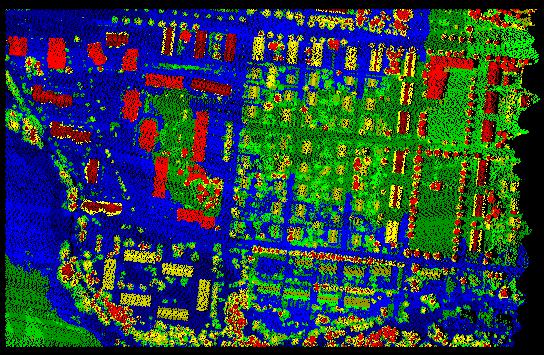
2.2 机载激光雷达数据 12
2.2.1 数据存储格式 12
2.2.2 点云属性 13
2.2.3 数据特点 13
2.2.4 数据组织 14
2.3 建筑物点云提取 17
2.3.1 滤波 18
2.3.2 建筑物点云分类 19
2.3.3 建筑物点群分割 21
3 RANSAC与区域增长结合进行平面分割 22
3.1点云分割方法概述 22
3.1.1 点云分割 22
3.1.2 点云分割方法分类 23
3.2 常用分割方法 24
3.2.1 点云曲率与法向量 24
3.2.2.1 点云法向量估计 24
3.2.2.2 点云曲率估计 25
3.2.2 点云区域增长分割 26
3.2.3 基于模型拟合分割 27
3.2.3.1 RANSAC算法 27
3.2.3.2 三维霍夫变换法 28
3.3 RANSAC与区域增长相结合进行平面分割 30
3.3.1 基于区域增长的点云粗分割 31
3.3.2 基于RANSAC平面拟合的点云精分割 32
4 建筑物重建 36
4.1 轮廓线提取 36
4.1.1 边缘点检测 36
4.1.2 边缘线拟合及简化 39
4.1.3 轮廓线规则化 41
4.2 建筑物重建 44
4.2.1 屋脊线提取 44
4.2.1.1 屋脊线参数估计 45
4.2.1.2 平面邻接关系判断及求屋脊线屋脊点 47
4.2.2 建筑物模型重建 48
5 实验分析 49
5.1 实验数据 49
5.2 实验设计及实施 50
5.3 建筑物提取以及点群分割实验 51
5.4 简单建筑物模型重建实验 52
5.4.1 简单建筑物模型重建 52
5.4.2 与Terrasolid进行比较实验 54
5.5 复杂建筑物模型重建实验 57
5.5.1 复杂建筑物模型重建 57
5.5.2 与Terrasolid进行比较实验 60
5.6 不同分辨率点云模型重建实验 61
5.7 实验结论 63
6 总结与展望 64
6.1 总结 64
6.2 展望 64
参考文献 66
致谢 70
论文研究内容
论文主要关注机载LiDAR数据处理及LiDAR技术在城市建模中的应用,重点围绕机载LiDAR数据的建筑物重建问题展开研究。主要研究内容可归纳为以下几个方面:
(1)点云滤波分类
点云数据滤波是建筑物重建的前提,它实质是地面脚点与非地面脚点的分离过程,分类过程就是将非地面点里面包含的地物进行细分,以此来提供所需的空间三维信息,本文采用的是不规则三角网算法进行建筑物点云的滤波处理,然后把建筑物点云数据提取出来,为后期建筑物重建做好准备。
(2)点云分割
采用KD-Tree对点云进行管理,使用协方差分析法估计法向量和曲率,采用基于区域增长的粗分割方法和基于RANSAC平面拟合的精分割方法实现点云平面分割
(3)建筑物模型重建
建筑物重建是论文的主要研究主题,也是目前的难点问题。针对复杂建筑物的自动重建问题,本文用Alpha-shape方法检测建筑物边缘点,用改进的管子算法和最小二乘拟合直线的方法对建筑物进行轮廓线提取,并对建筑物的轮廓线进行了规则化处理。并结合建筑物轮廓线信息通过屋顶面相交方法提取屋脊线,进而基于利用带约束条件的Delaunay三角构网来构建建筑物几何模型。
1.3.2 论文的组织
论文针对机载LiDAR数据的建筑物重建问题开展研究,立足于点云滤波、建筑物提取以及建筑物重建的现有研究基础,提出可靠高效的地形与建筑物重建方案,并通过实验验证相关模型与算法的可行性。论文分为六个章节,各章节的具体内容安排如下:
第1章:阐述了利用机载LiDAR数据进行建筑物重建的研究背景与意义,梳理并分析了与该技术相关的国内外研究现状和存在的问题。
第2章:介绍机载激光雷达的系统组成、原理、数据特点以及属性;同时也对机载激光雷达滤波和分类的相关概念进行了简单的描述,并利用不规则三角网算法进行建筑物点云提取。提取完之后的建筑物点云利用 KD-Tree进行所有建筑物的单独隔离。
第3章:介绍点云分割的定义、分割方法分类以及在现有常用的平面分割方法的基础之上,提出了一种基于点云分割平面相交的线特征提取方法。该方法采用KD-Tree对点云进行管理,使用协方差分析法估计法向量和曲率,采用基于区域增长的粗分割方法和基于RANSAC平面拟合的精分割方法实现点云平面分割。
第4章:建筑物重建。本文首先用Alpha-shape算法对建筑物边缘点进行检测,用改进的管子算法和最小二乘拟合直线的方法对建筑物屋进行轮廓线提取,并对建筑物的轮廓线进行了规则化处理。然后通过屋顶面相交方法提取屋脊线和屋脊点,此方法具有较高的定位精度,且有一定的抗噪性和稳健性。最后基于利用带约束条件的Delaunay三角构网来构建几何模型。
第5章:实验。采用相应的实验数据对其进行实验,本章分别进行单个简单的建筑物实验,复杂建筑物重建实验,以及不同分辨率下点云模型的重建实验,并对实验进行了分析和总结。
第6章:总结与展望。对全文的研究工作以及不足之处进行了总结,并指出了未来的学习和研究方向。
本文对机载LiDAR数据的地形与建筑物重建中的几项关键技术进行研究,重点对建筑物点云提取、建筑物点云分割和建筑物模型重建这3个技术难点展开技术攻关,并取得了初步的研究成果。论文的主要研究工作和取得的成果归纳如下:
(1)阐述了利用机载LiDAR数据进行建筑物重建的研究背景与意义,梳理并分析了与该技术相关的国内外研究现状和存在的问题。
(2)介绍机载激光雷达的系统组成、原理、数据特点以及属性;同时也对机载激光雷达滤波和分类的相关概念进行了简单的描述,并利用不规则三角网算法进行建筑物点云提取。提取完之后的建筑物点云利用 KD-Tree进行所有建筑物的单独隔离。
(3)介绍点云分割的定义、分割方法分类以及在现有常用的平面分割方法的基础之上,提出采用KD-Tree对点云进行管理,使用协方差分析法估计法向量和曲率,基于区域增长的粗分割方法和基于RANSAC平面拟合的精分割方法实现点云平面分割的方法,然后通过屋顶面相交方法提取屋脊线和屋脊点,此方法具有较高的定位精度,且有一定的抗噪性和稳健性。
(4)用Alpha-shape方法检测建筑物边缘点,用改进的管子算法和最小二乘拟合直线的方法对建筑物屋进行轮廓线提取,并对建筑物的轮廓线进行了分组轮廓线规则化处理。
(5)提出了基于利用带约束条件的Delaunay三角构网来建筑物模型重建方法,实验表明该方法能够实现简单以及复杂的建筑物重建,重建效果与TerraSolid软件相当。
(6)单个建筑、复杂建筑物重建实验证明,本文方法能够实现建筑物模型的自动构建,重建效果与TerraSolid软件相当;通过不同分辨率点云下的模型重建实验说明,本文方法在不同分辨率点云条件下的鲁棒性要优于TerraSolid软件。
Tags:机载LIDAR;点云分割;轮廓线;规则化;模型重建
作者:佚名
- 好的评价 如果您觉得此文章好,就请您
0%(0) 

- 差的评价 如果您觉得此文章差,就请您
0%(0) 